Строительство тяжелого FPV квадрокоптера собственной конструкции на базе рамы Spidex
Предпосылки и потребности для самостоятельного строительства авиа дрона квадрокоптера следующие:
- На старом коптере не хватает места под навесное оборудование
- Хочется поставить большой аккумулятор и летать дольше и дальше
- Хочется иметь максимально жесткую раму, но обеспечивать виброизоляцию камеры от моторов.
- Хочется сделать квадрик с привлекательным видом, а не монстра на стандартной крестовидной раме с узлом проводов.
- Хочется сделать квадрокоптер легче конструкций на базe X525 но с большим аккумулятором
 Праобразом бщей формы авиа дрона послужила рама Spidex v2. Она имеет удачное расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Эта компоновка позволяет расположить камеру так, что пропеллеры не болтались на экране при любом наклоне коптера. Кроме того схема имеет хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. И наконец все это смотрится весьма прилично и внушительно. Но полностью копировать Spidex не имеет смысла. В числе его недостатков гнущиеся даже без аварий (просто под нагрузкой) алюминиевые трубки. Да и использование широко распространенной GoPro Hero HD2, без защитного корпуса Spidex не предусматривает. Как результат целесообразнее от Spdex берем общую компоновку а раму собираем самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с
Праобразом бщей формы авиа дрона послужила рама Spidex v2. Она имеет удачное расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Эта компоновка позволяет расположить камеру так, что пропеллеры не болтались на экране при любом наклоне коптера. Кроме того схема имеет хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. И наконец все это смотрится весьма прилично и внушительно. Но полностью копировать Spidex не имеет смысла. В числе его недостатков гнущиеся даже без аварий (просто под нагрузкой) алюминиевые трубки. Да и использование широко распространенной GoPro Hero HD2, без защитного корпуса Spidex не предусматривает. Как результат целесообразнее от Spdex берем общую компоновку а раму собираем самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с  зажимами. Вам понадобятся карбоновыe трубки (16×14 мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой друго мелочевки по списку.
зажимами. Вам понадобятся карбоновыe трубки (16×14 мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой друго мелочевки по списку.
Электроника в составе коптера следующая:
- Моторы: 4x NTM 28-30 750kv
- Контроллеры моторов: 4x HobbyKing Blue Series 30A, с прошивкой SimonK
- Пропеллеры: 4x Graupner E-Prop 11×5
- Плата управления: Crius MultiWii SE v0.1, с MultiWii 2.2
- Аккумуляторы: Turnigy Nanotech 4S 4500mAh 25-35C
- Камера: GoPro HD Hero2
- Видеопередатчик: ImmersionRC 5.8G 25mW
- Антенна: Clowerleaf 5.8G, DIY от умельца на местном форуме
- OSD: MinimOSD с прошивкой KV Team OSD для MultiWii 2.2
- GPS: Drotek I2C GPS
- Радиоприемник: Graupner HoTT GR-16, под мой передатчик (MX-16)
Процесс сборки
 Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилим из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо. Примеряем зажимы к нижнему центру. Центр собираем для проверки, все ли стыкуется как надо. Прикручиваем все остальные части рамы. Похоже, что почти готово? Но… Оси моторов обрезаем — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь… … и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки одеть обязательно. Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода. Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо много — и это всeго лишь квадрик. Размещаем контроллеры на нижней полураме. Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано! Изолируем контроллеры новой термоусадкой, когда все кабеля на месте. Устанавливаем контроллеры моторов на
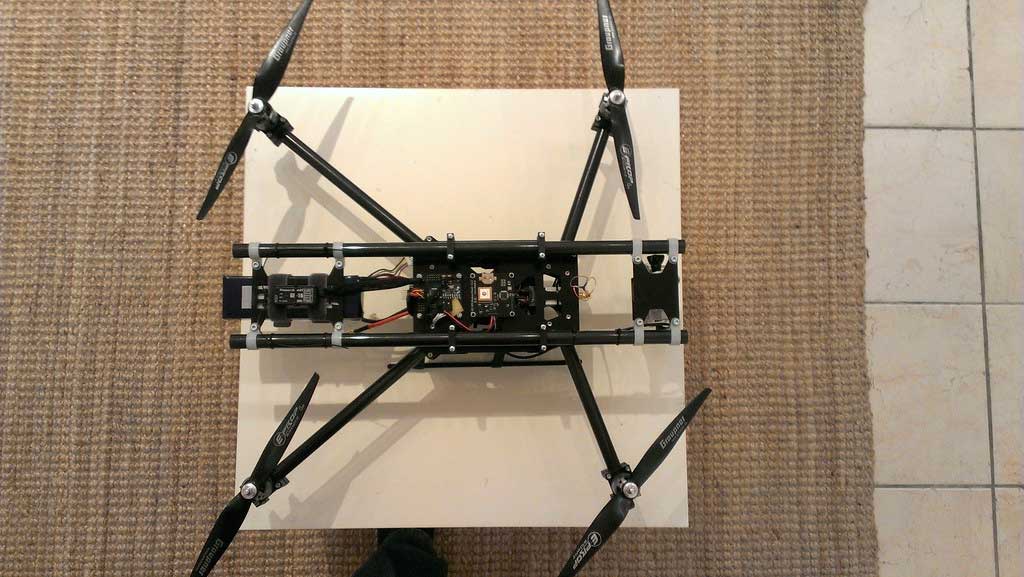
Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилим из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо. Примеряем зажимы к нижнему центру. Центр собираем для проверки, все ли стыкуется как надо. Прикручиваем все остальные части рамы. Похоже, что почти готово? Но… Оси моторов обрезаем — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь… … и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки одеть обязательно. Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода. Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо много — и это всeго лишь квадрик. Размещаем контроллеры на нижней полураме. Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано! Изолируем контроллеры новой термоусадкой, когда все кабеля на месте. Устанавливаем контроллеры моторов на  их окончательную позицию. Проводов многовато, но достаточно чисто. Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком… Далее стягиваем тонкой медной проволокой… Далее спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее. Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху. Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором. Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик. Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки. Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода… Ура все готово! Облегчить конструкцию не удалось, однако все сомнения были полностью развеяны во время первого полета.
их окончательную позицию. Проводов многовато, но достаточно чисто. Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком… Далее стягиваем тонкой медной проволокой… Далее спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее. Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху. Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором. Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик. Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки. Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода… Ура все готово! Облегчить конструкцию не удалось, однако все сомнения были полностью развеяны во время первого полета.
Аппарат получился удачный.
Подробности разработки и сборки с большими фотографиями можно скачать здесь…